





















All Products
-
Multifunctional Handheld Infrared Night Vision
-
Explosive Ordnance Disposal Robot
-
Miniature Reconnaissance Robot
-
Monocular Digital Night Vision
-
Digital Night Vision Device
-
Anti Sniper
-
Portable Radar
-
Patrol Recording Flashlight
-
Tactical Special Operations Equipment
-
Rifle Scope
-
Laser Rangefinder
-
Military Model
-
Tactical Gear
-
Inflatable Decoys
Powerful Hound-III EOD Robot Safely Approaching And Disposing Of Explosive Hazards








| Place of Origin | China |
|---|---|
| Brand Name | Particle |
| Model Number | REOD4000 |
| Minimum Order Quantity | 1 |
| Price | $356,653 |
| Payment Terms | T/T |

Contact me for free samples and coupons.
Whatsapp:0086 18588475571
Wechat: 0086 18588475571
Skype: sales10@aixton.com
If you have any concern, we provide 24-hour online help.
xProduct Details
| Robot Size | 1600×850×1300 Mm(Fully Stowed) | Robot Weight | ≤350kg(Contain Batteries) |
|---|---|---|---|
| Maximum Speed | ≥5m/s | Over Obstacle Ability | ≥400mm |
| Across Groove Width | ≥800mm | Gradeability | ≥45º |
| The Maximum Slope Passing Capacity | 35° | Wading Depth | ≥500mm |
| Battery Life(Normal Temperature) | ≥10h | Maximum Grabbing Distance | 2.6m |
| Maximum Grabbing Weight | ≥200kg | Maximum Gripping Diameter | ≥355mm |
| Maximum Gripping Depth | 2.2m | Movable Joints | 7 |
| Controller Size | ≤400×300×100mm | Controller Weight | ≤3kg(Without Backpack) |
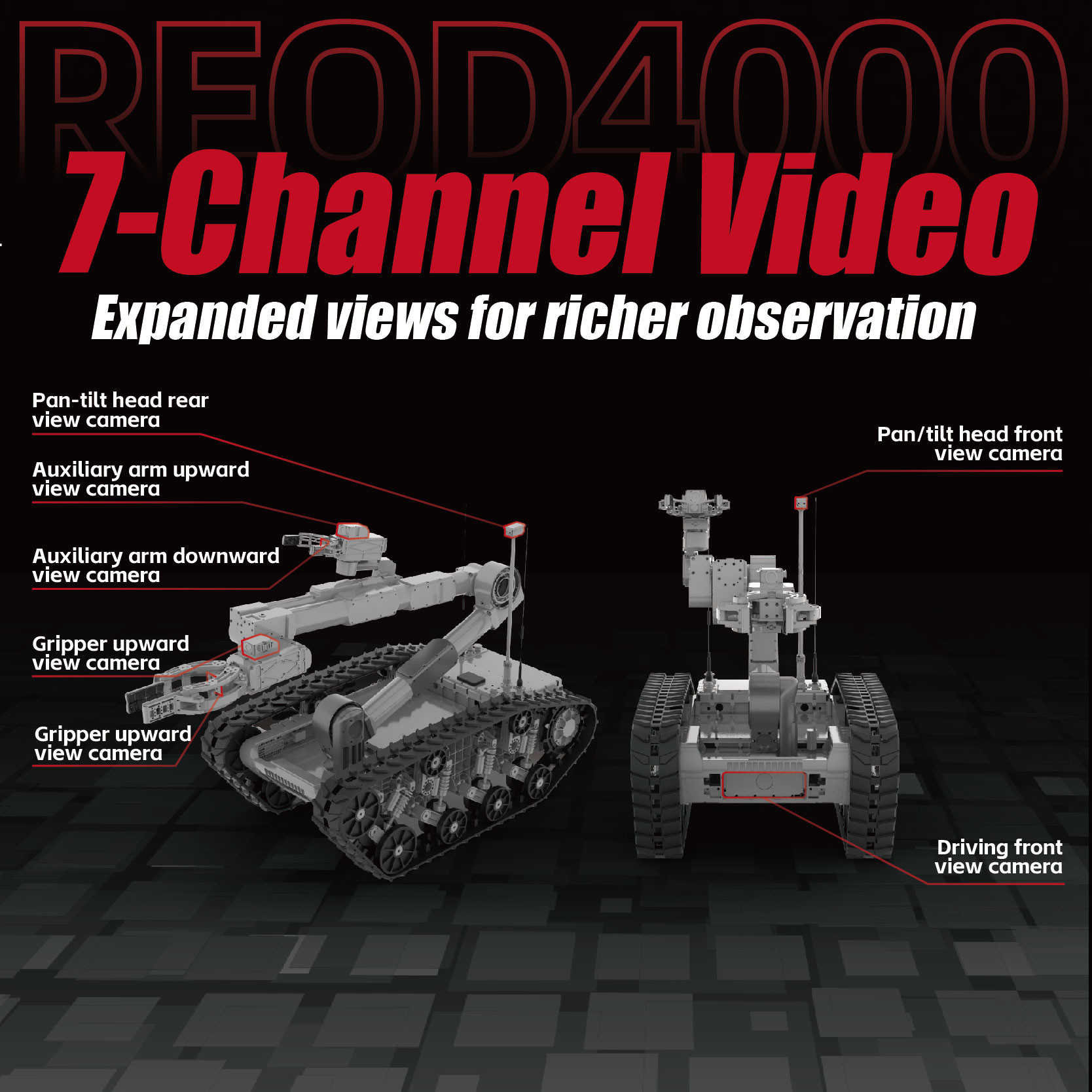
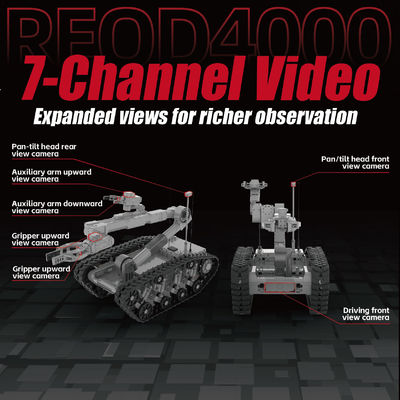
| Controller Display Screen | ≥12'' LCD | Controller Video Display | ≥7-channel |
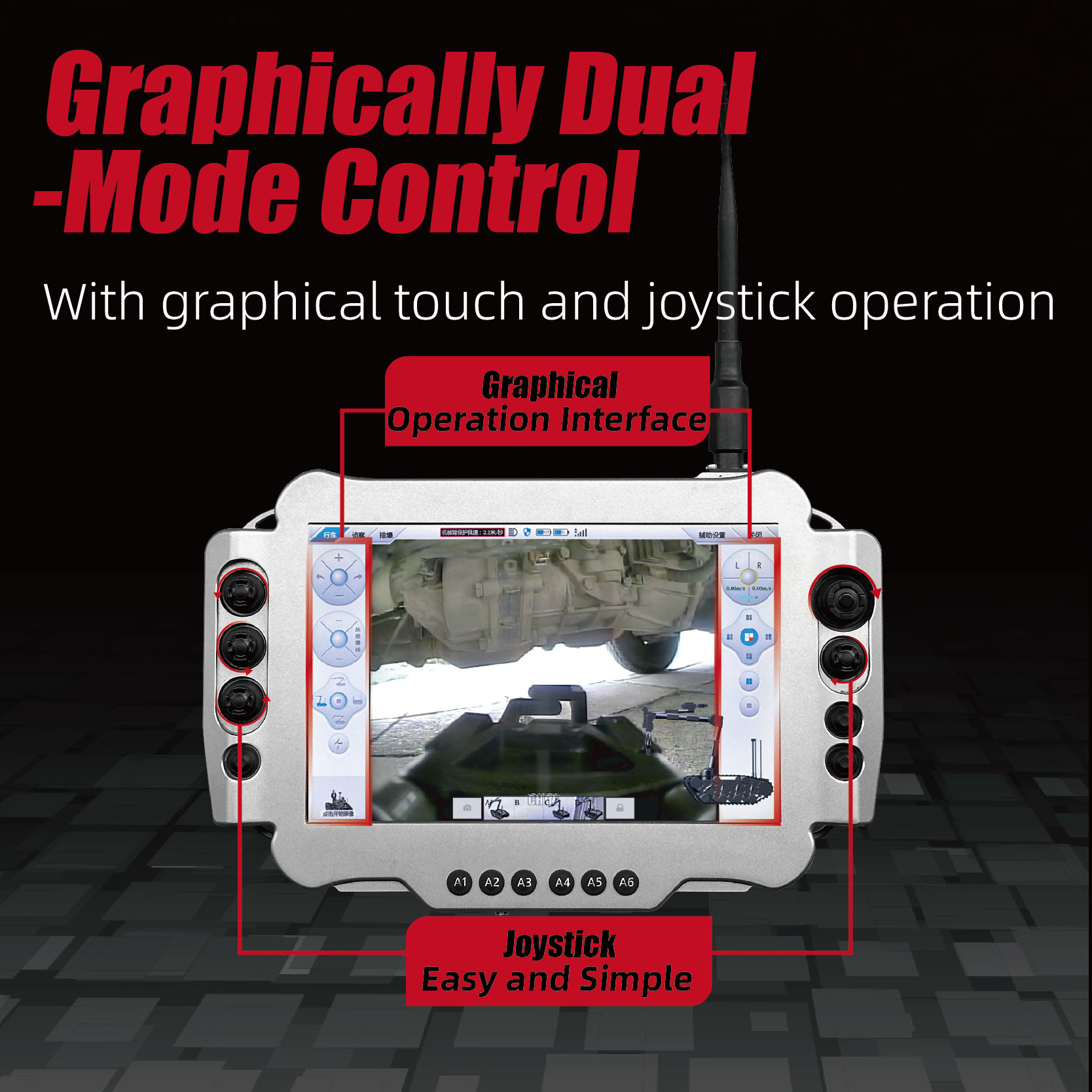
| Operation Method | Dual-mode Operation Of Button Rocker And Touch Screen | Control Method | Cable Control≥200m(Standard Cable),Wireless Control≥1000m(Outdoor) |
| Robot Platform IP Grade | IP66 | Arm IP Grade | IP66 |
| Operating Temperature | -40℃~+50℃ | Storage Temperature | -45℃~+60℃ |
| Highlight | IP66 explosive ordnance disposal robot,2.6m explosive ordnance disposal robot,Hound-III EOD Robot |
||
Product Description
Powerful Hound-III EOD Robot Safely Approaching and Disposing of Explosive Hazards
Description and Features
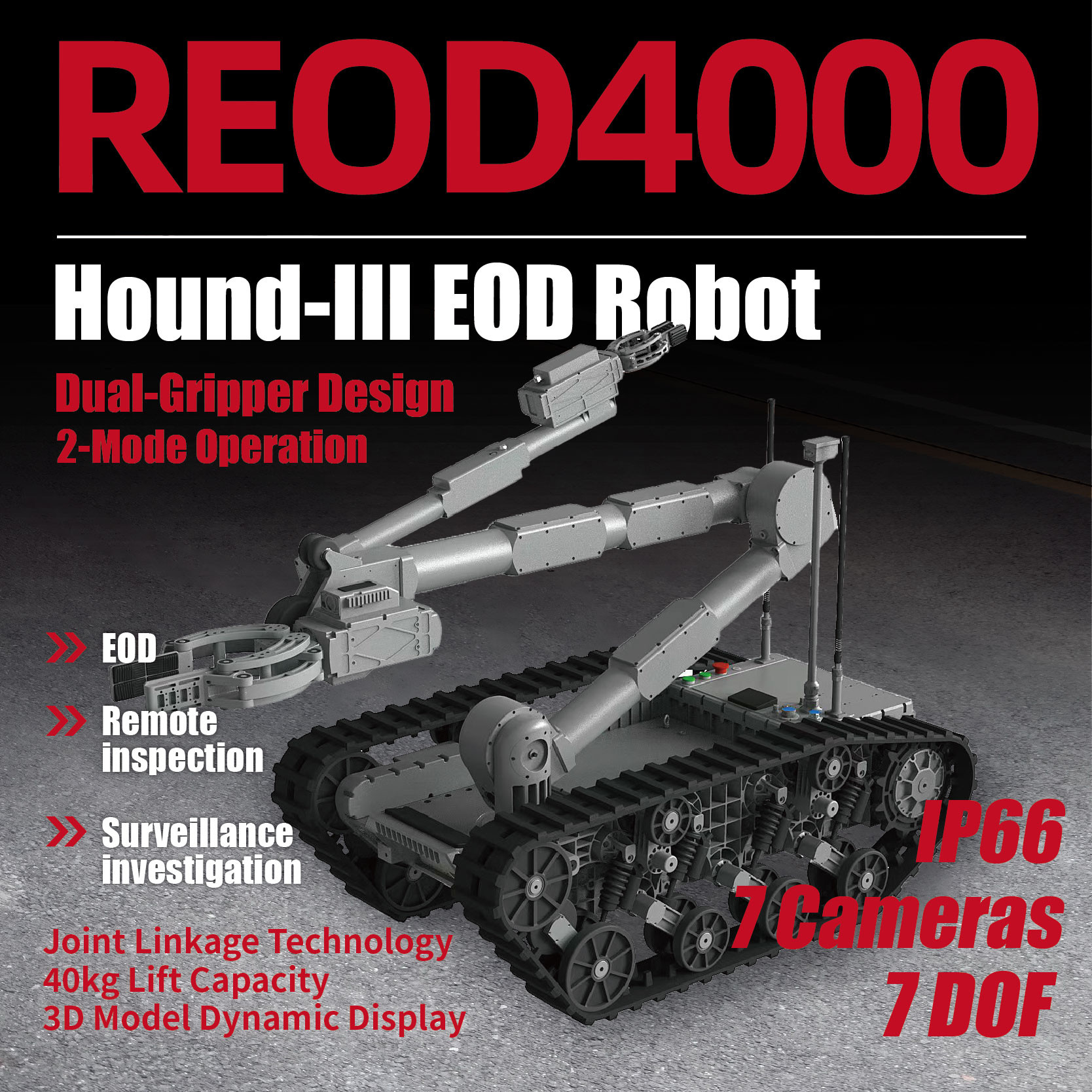
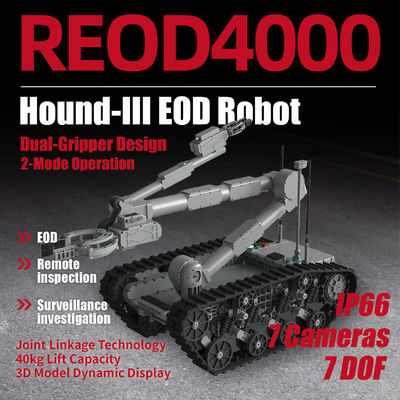
The JP REOD4000 EOD Robot is an advanced medium-sized solution for explosive ordnance disposal (EOD) in high-risk environments. Featuring a powerful 7-degree-of-freedom robotic arm, it allows operators to manage hazardous objects with precision, ensuring maximum safety in restricted or complex conditions. The "Christie" suspension system provides seamless maneuverability over uneven and complex terrains, making the REOD4000 well-suited for off-road and challenging environments. With a maximum snatch weight of 200 kg, it significantly outperforms its counterparts, offering reliable support for explosive disposal, public safety, and emergency response scenarios.
The REOD4000 has dimensions of 1600 mm × 850 mm × 1300 mm (fully stowed) and a weight of ≤350 kg, which ensures both capability and mobility. It features a maximum speed of ≥5 m/s, an obstacle clearance of ≥400 mm, and a gradeability of ≥45°, providing superior maneuverability and adaptability in various terrains. Equipped with a remote-controlled operation system, the REOD4000 can approach hazardous areas, investigate potential dangers, and execute disposal tasks efficiently, minimizing risks to personnel.
![]()
High-Strength Mechanical Arm Design — Enhanced Snatch Performance
With the "High-Strength Mechanical Arm Design," the robot is equipped with powerful snatch performance, enabling it to efficiently grasp and handle objects with ease, significantly improving operational efficiency and effectiveness in challenging environments.
![]()
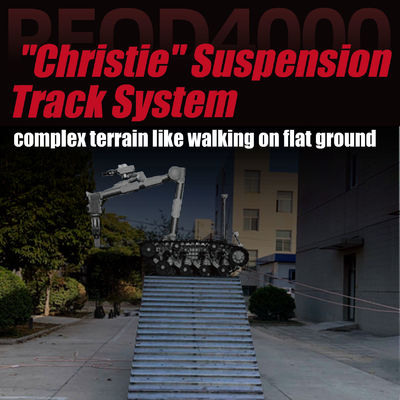
"Christie" Suspension Track System — Effortless Navigation on Complex Terrain
With the "Christie" Suspension Track System, the robot can traverse complex terrain as easily as walking on flat ground. This advanced system ensures smooth and stable movement, greatly enhancing mobility and performance in rugged and uneven environments.
![]()
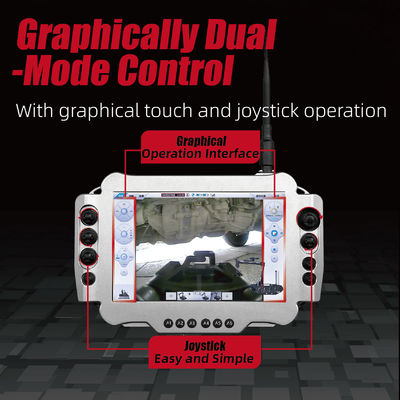
Graphically Dual-Mode Operation — Convenient and Reliable Operation Experience
With the "Graphically Dual-Mode Operation" system, users can seamlessly switch between modes, offering a convenient and reliable operation experience. The intuitive interface ensures ease of use, even in demanding scenarios.
![]()
Remote 3D Real-Time Display — Precision at Your Fingertips
The "Remote 3D Real-Time Display" brings fine operation directly in front of your eyes, allowing you to control and monitor tasks with unmatched precision, no matter the distance.
![]()
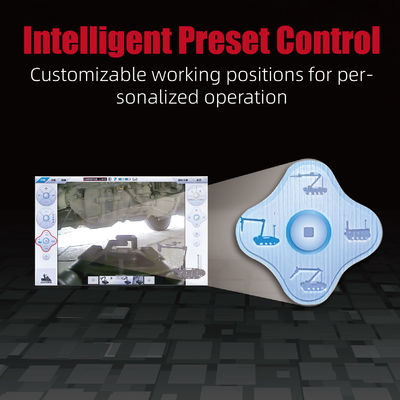
Intelligent "Preset" Control Design — Personalized Posture Settings
The "Intelligent 'Preset' Control Design" allows personalized working posture settings, enabling operators to preset their preferred positions and streamline task execution for greater efficiency and comfort.
![]()
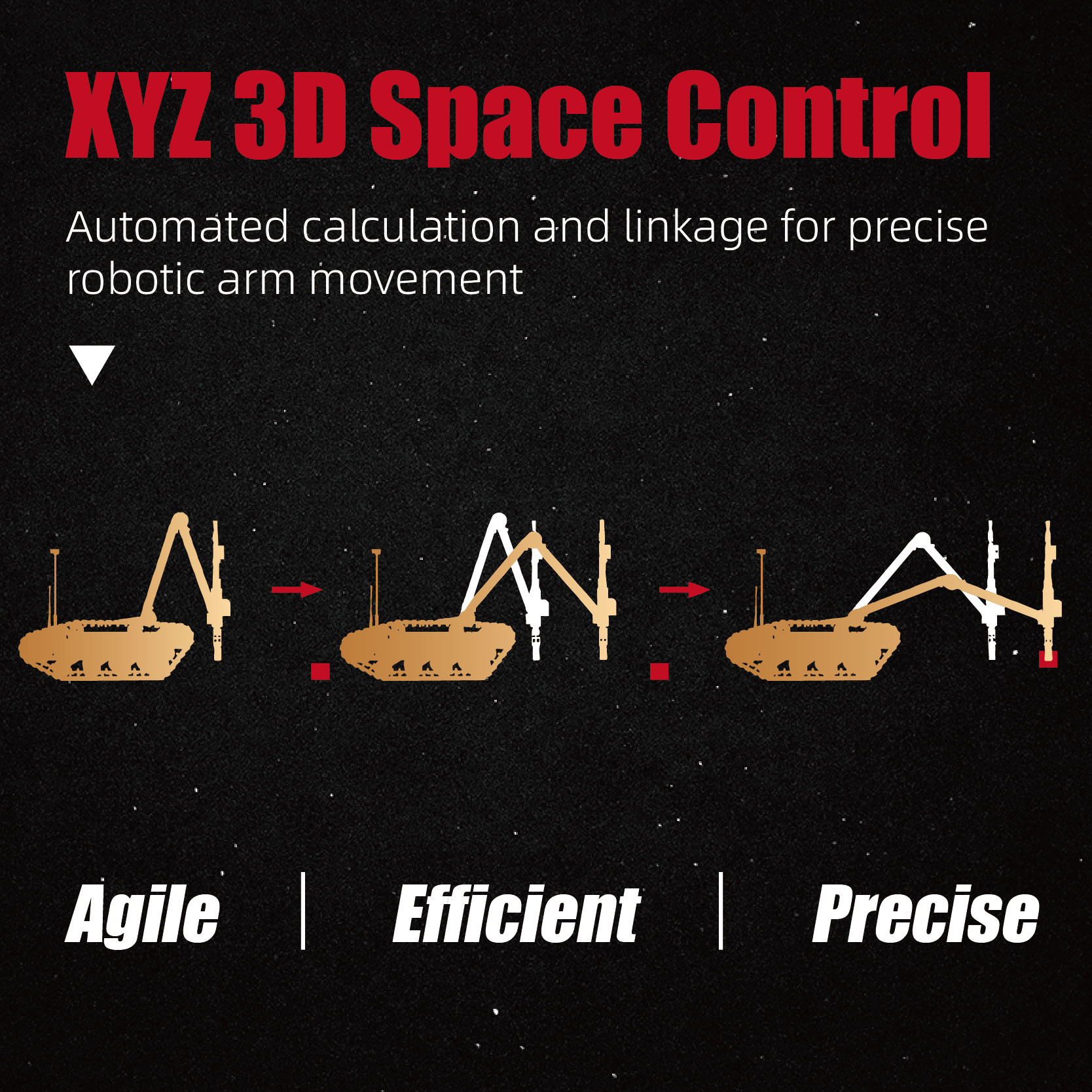
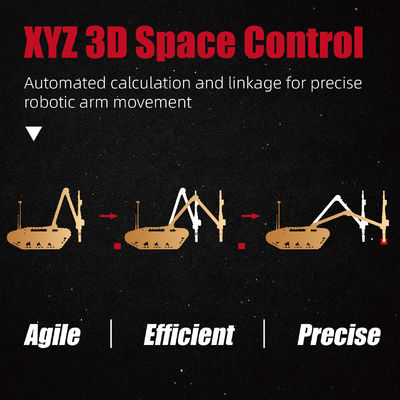
X-Y-Z 3D Robotic Arm Linkage — Precise Control with Automatic Calculation
The "X-Y-Z Three-Dimensional Space Robotic Arm Linkage" design, based on automatic calculation, provides precise control, helping users effortlessly manage complex movements with increased accuracy.
![]()
Applications
Image Gallery
|
|
Technical Parameters
| Robot Platform | |
|
Size |
1600×850×1300 mm(Fully Stowed) |
|
Weight |
≤350kg(Contain batteries) |
|
Maximum Speed |
≥5m/s |
|
Over Obstacle Ability |
≥400mm |
|
Across Groove Width |
≥800mm |
|
Gradeability |
≥45º |
|
The Maximum Slope Passing Capacity |
35° |
|
Wading Depth |
≥500mm |
|
Battery Life(Normal temperature) |
≥10h |
| Robotic Arm Grabbing Performance | |
|
Maximum Grabbing Distance |
2.6m |
|
Maximum Grabbing Weight |
≥200kg |
|
Maximum Gripping Diameter |
≥355mm |
|
Maximum Gripping Depth |
2.2m |
|
Movable Joints |
7 |
| Portable Controller | |
|
Size |
≤400×300×100mm(excluding the antenna) |
|
Weight |
≤3kg(Without backpack) |
|
Display Screen |
≥12'' LCD |
|
Video Display |
≥7-channel |
|
Operation Method |
Dual-mode operation of button rocker and touch screen |
|
Control Method |
Cable control≥200m(Standard cable),Wireless control≥1000m(Outdoor) |
| Protection level and environmental adaptability | |
|
Robot Platform |
IP66 |
|
Arm |
IP66 |
|
Operating Temperature |
-40℃~+50℃ |
Ms. Amy
Email : amy-huang@mysmech.com
Recommended Products