





















All Products
-
Multifunctional Handheld Infrared Night Vision
-
Explosive Ordnance Disposal Robot
-
Miniature Reconnaissance Robot
-
Monocular Digital Night Vision
-
Digital Night Vision Device
-
Anti Sniper
-
Portable Radar
-
Patrol Recording Flashlight
-
Tactical Special Operations Equipment
-
Rifle Scope
-
Laser Rangefinder
-
Military Model
-
Tactical Gear
-
Inflatable Decoys
Lightweight Explosive Ordnance Disposal EOD Robots Hound-I







| Place of Origin | China |
|---|---|
| Brand Name | Particle |
| Model Number | REOD400 |
| Price | $102,881 |
| Payment Terms | T/T |

Contact me for free samples and coupons.
Whatsapp:0086 18588475571
Wechat: 0086 18588475571
Skype: sales10@aixton.com
If you have any concern, we provide 24-hour online help.
xProduct Details
| Size | ≤830mm×600mm×460mm(Fully Stowed) | Weight | ≤37kg(Contains Two Sets Of Batteries) |
|---|---|---|---|
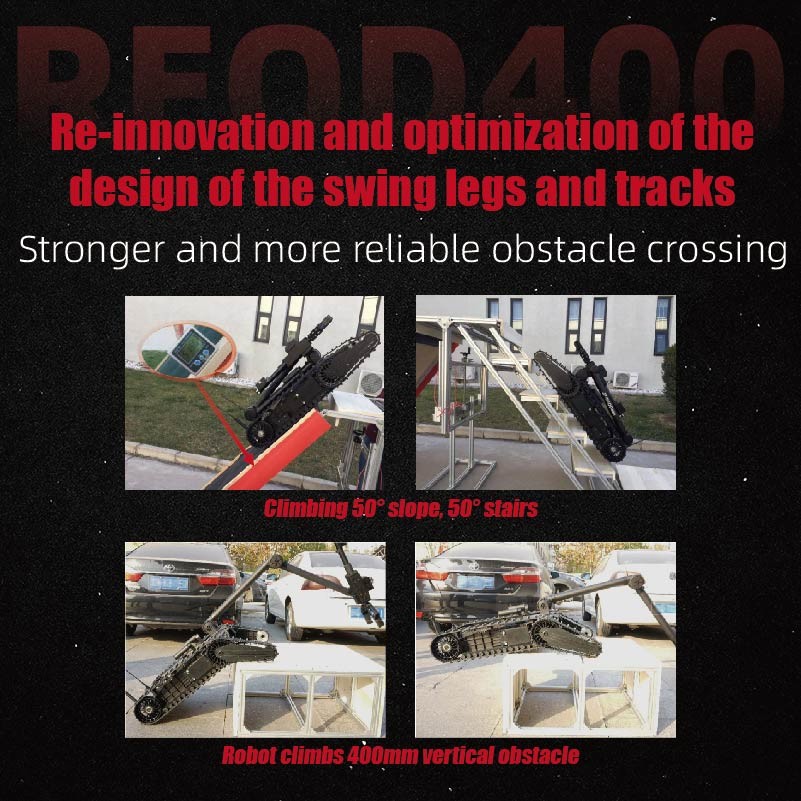
| Over Obstacle Ability | ≥300mm | Across Groove Width | ≥400mm |
| Gradeability | ≥45° | Climb Stairs | ≥45° |
| Movable Joints | 8 | Farthest Grabbing Distance | ≥1650mm |
| Maximum Opening Width Of Gripper | ≥160mm | Lift Capacity | 6-16kg |
| Operation Method | Dual-mode Operation Of Button Rocker And Touch Screen | Control Method | Cable Control≥100m(Standard Cable),Wireless Control≥1000m(Outdoor) |
| Battery Life(Normal Temperature) | ≥2h | IP Grade | IP66 |
| Highlight | Hound-I eod robots,Explosive Ordnance Disposal eod robots,Lightweight robot eod |
||
Product Description
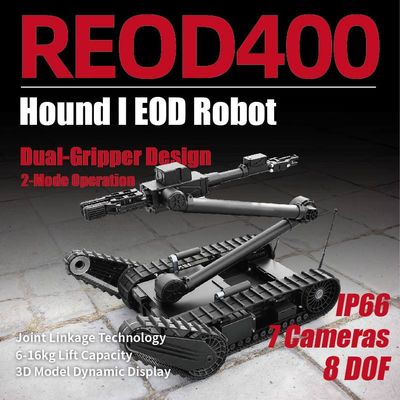
Lightweight Explosive Ordnance Disposal EOD Robot Hound-I
Description And Features
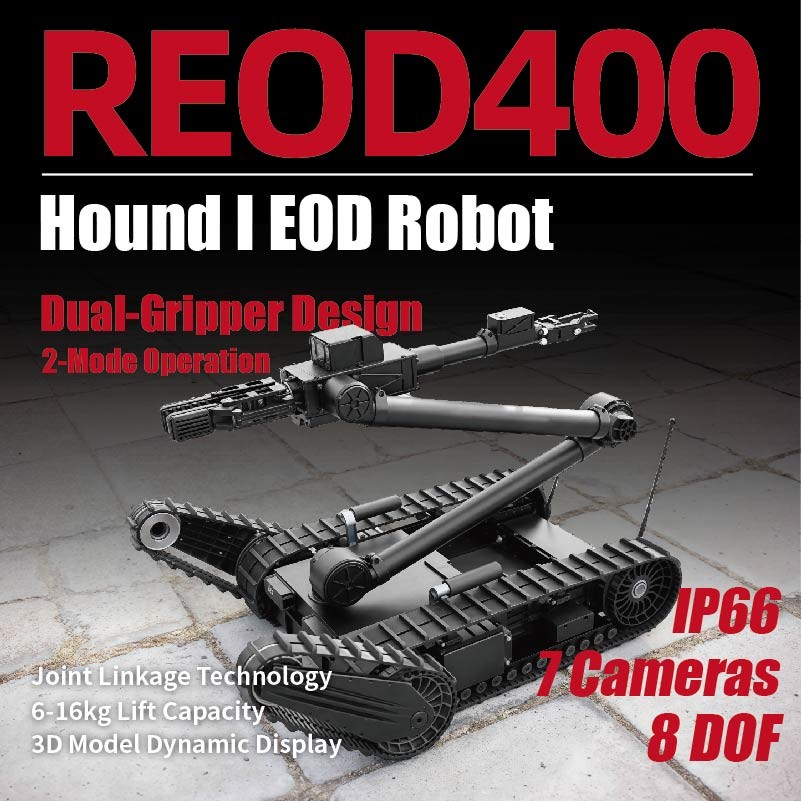
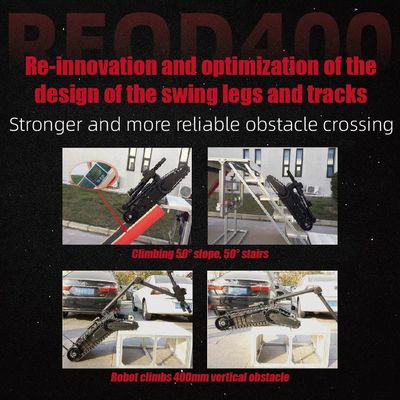
The REOD400 EOD Robot is an advanced solution for explosive ordnance disposal (EOD) in high-risk environments. Featuring a unique "two-gripper" design, it can simultaneously perform diverse tasks, making it highly efficient for operations like urban anti-terrorism, public safety, earthquake relief, and bomb disposal. The robot is compact and lightweight, with dimensions of ≤830mm × 600mm × 460mm (fully stowed) and a weight of ≤37kg. It has a maximum speed of ≥1.8m/s with 5 gears and a continuous variable drive, an obstacle clearance of ≥300mm, and a gradeability and stair climbing ability of up to 45°, ensuring superior maneuverability and adaptability in various terrains.
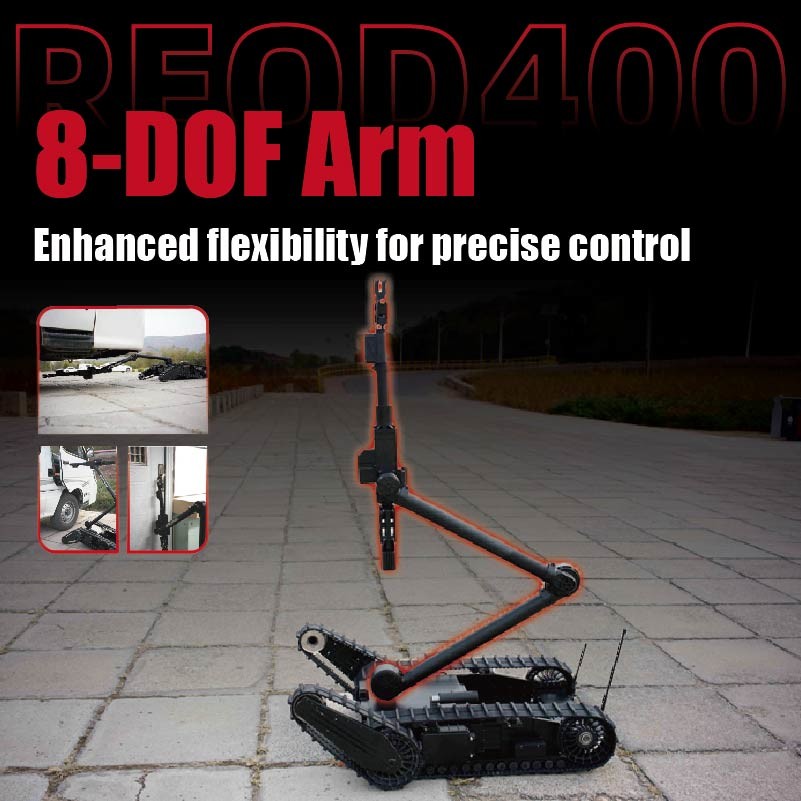
Equipped with an 8-degree-of-freedom Manipulator, the REOD400 offers precise control with a maximum gripping height of ≥1700mm (main claw) and a farthest grabbing distance of ≥1380mm (main claw). The robot supports a 7-channel video display, enabling richer observation perspectives, and features remote 3D posture real-time display capabilities. With a battery life of ≥2 hours at normal temperature, an IP66 rating for dust and water resistance, and control methods that include cable control up to 100m and wireless control up to 1000m, the REOD400 is built for reliability and versatility in challenging conditions. Additionally, it offers OEM and ODM customization options to meet specific operational needs.
Innovative "Dual Gripper" Design — Enhancing Flexibility and Feasibility in Task Execution
The innovative "Dual Gripper" design features a robotic arm equipped with both a "primary gripping claw" and a "multi-functional extension claw" . This design greatly enhances the robot's flexibility and feasibility in executing tasks, providing effective support for completing a variety of tasks in a single operation. The "Dual Gripper" design effectively addresses the limitations of traditional bomb disposal robots that only have a "single gripper," which cannot simultaneously perform tasks like "grasping dangerous objects" and "opening doors, cutting, clamping, severing, hooking, and other auxiliary actions." For example, it can achieve tasks such as "opening a door and grabbing an object in one go."
The "Dual Gripper" design successfully frees the "primary gripping claw" from having to perform functions other than gripping, thereby significantly enhancing the robot's gripping capabilities. The primary claw can grasp suspicious hazardous items weighing 6-16 kg, with a gripping width of up to 160 mm and a maximum clamping force of 300 N. Additionally, depending on the specific operational tasks, the "gripper tool set" can be quickly replaced to handle different types and shapes of dangerous items.
Support Touch / Joystick Control— More User-Friendly Interaction and Reliable Operation
The graphical touch / joystick control operation design is currently a leading bomb disposal robot control solution internationally. It has been highly recognized by users for its more user-friendly interaction and reliable operation. Its main features are as follows:
- Graphical Operation Design: All operations are designed in a graphical manner, eliminating the need for users to memorize complex button functions and operating protocols. This user-friendly interface makes operation simple and intuitive, significantly reducing training time.
- Touch / joystick Control Operation Design: Both joystick buttons and a touchscreen can be used to perform all operations of the robot. The redundancy provided by these two operating methods not only enhances system reliability but also improves operational efficiency by combining joystick buttons with touchscreen controls.
|
|
Remote 3D Real-Time Display — Close at Hand, More Intuitive Operation
Since bomb disposal robots often operate beyond the line of sight during missions, real-time information about the angles and spatial positions of the robot's joints is crucial for the operators. The REOD400 uses high-speed links and advanced computer technology to not only achieve real-time feedback of the robot's status information but also to employ leading 3D virtual display technology for remote real-time display of the robot's 3D status. This makes the robot feel "close at hand" even when it is "far away," allowing for more intuitive operation.
The main features of the remote 3D real-time display are as follows:
- Real-time display of the robot's 3D status
- Observation of the robot's 3D status from various angles
- Zooming in and out of the robot's 3D status
The handheld controller of the robot reproduces the remote 3D status of the robot, allowing the 3D model to be zoomed in, zoomed out, and observed from any angle.
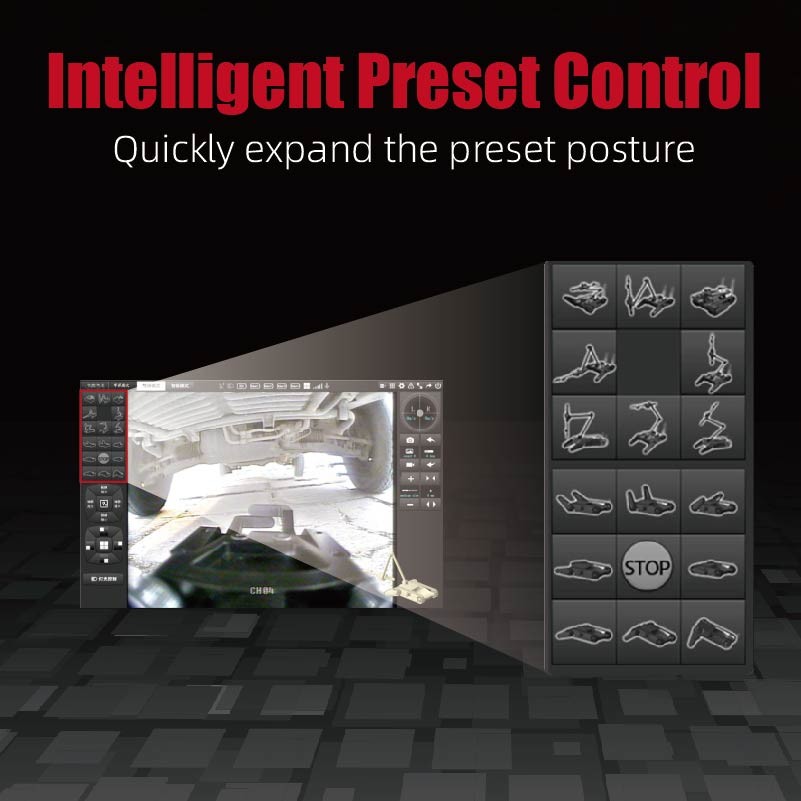
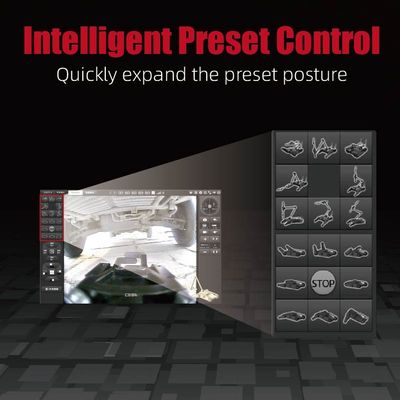
Intelligent Preset Posture Control Design — Simpler and Faster Operation
With the "Intelligent Preset Posture Control for Common Tasks," the robot can "automatically reach a pre-set position with one click" based on the user's needs. This feature greatly reduces the amount of manual operation required on-site, serving as an effective assistant for frontline operators and enhancing the reliability and safety of bomb disposal tasks.
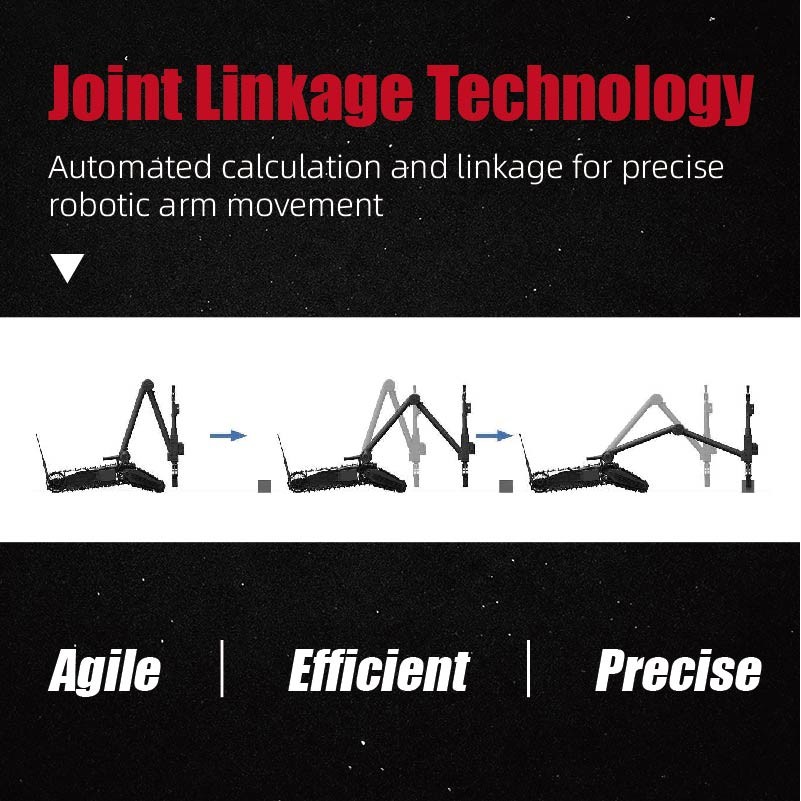
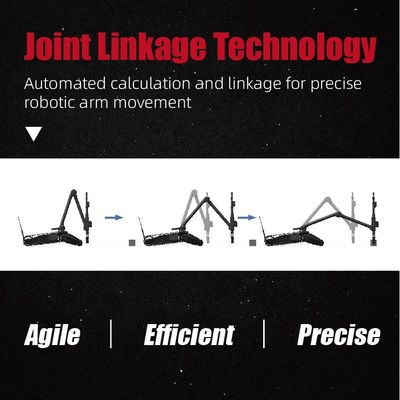
"X-Y-Z" Joint Linkage Technology — More Precise and Efficient Control
The “X-Y-Z” joint linkage technology operation design based on automatic calculation, also known as "Cartesian coordinate-based gripper translation control design," transforms the traditional "single-joint" control of bomb disposal robots into "multi-joint coordinated" control. This significantly improves the operational efficiency and accuracy of bomb disposal robots. Compared to the "single-joint" control design, it reduces the average operation time by 80%.
The REOD400 achieves "Cartesian coordinate-based gripper translation control" through automatic calculation. For grasping suspicious hazardous items in a horizontal one-dimensional space, it quickly controls the robot to achieve "multi-joint coordinated movement" for one-dimensional space gripper translation. This greatly reduces operational difficulty and increases accuracy, allowing for almost immediate positioning without the need for repeated iterations.
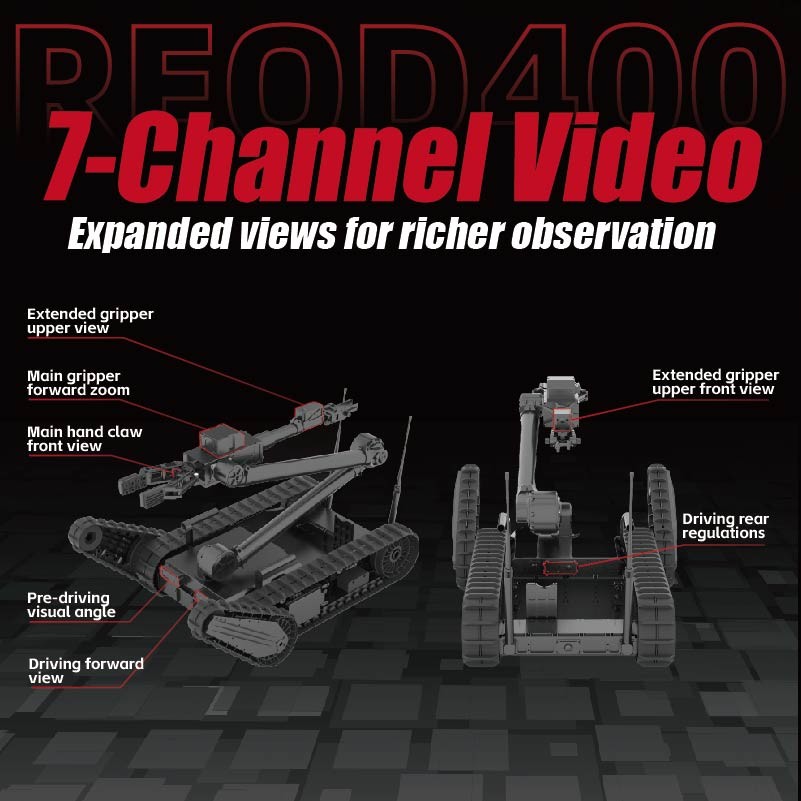
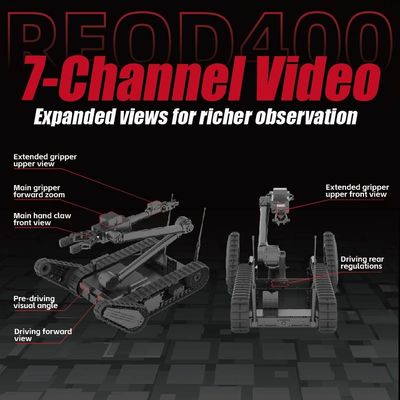
Mode-Adaptive Imaging System — Seven Camera Views for Enhanced Observation
The robot’s imaging system acts as the eyes of the operator. The REOD400 features an innovative mode-adaptive imaging system design with a 7-camera system, significantly enhancing frontline operators' ability to perceive remote environments. The design of the 7-camera system is not a simple arrangement but rather an improvement and optimization based on issues encountered by users during actual use.
The imaging system is generally divided into three image combinations: driving mode, primary gripper mode, and extended gripper mode. It automatically switches between these modes based on typical tasks such as driving, gripping, and observing, offering stronger remote environmental awareness and a richer range of observation angles.
Eight-Degree-of-Freedom Integrated Robotic Arm Design — More Flexible and Safer Control
The REOD400 robotic arm features an 8-degree-of-freedom integrated design, providing strong spatial reach capabilities. This design allows the robotic arm to perform not only conventional bomb disposal tasks but also operations that conventional 5-degree or 6-degree-of-freedom bomb disposal robots cannot handle, such as grasping objects in high, low, deep pit, or tabletop environments, as well as conducting multi-angle reconnaissance in high, low, and deep pit environments.
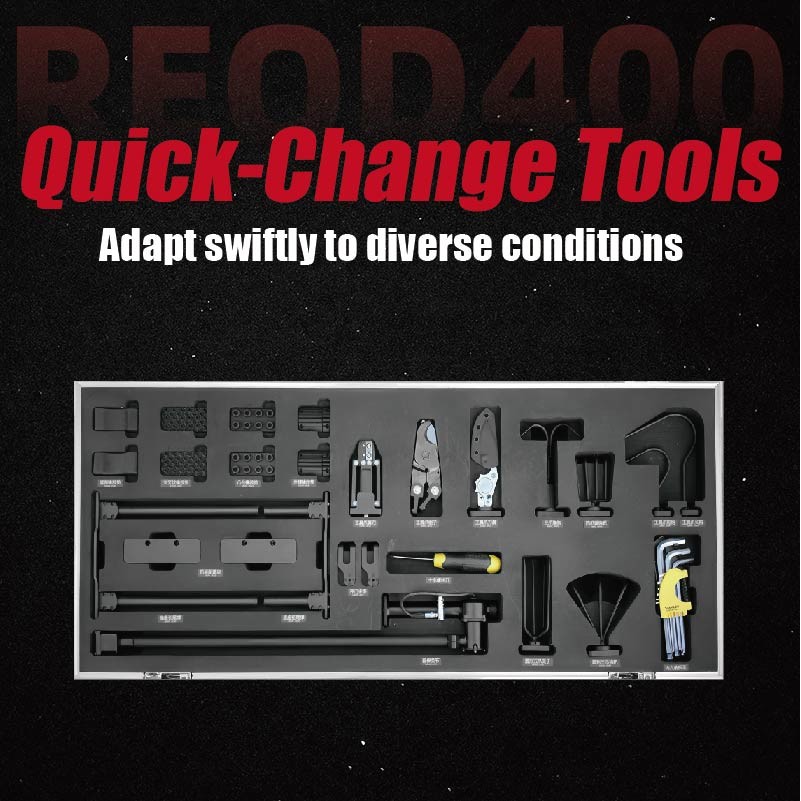
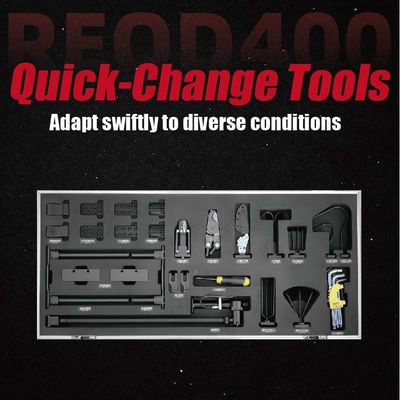
Versatile Quick-Change Tool System
The REOD400 robot is equipped with 18 types of "quick-change tools," including 6 gripping tool sets, 6 basic tool sets, and 6 extended tool sets, allowing for quick replacement of the "gripping tool sets" based on different operational tasks and the types and shapes of various hazardous objects, thereby meeting the diverse operational needs of users.
Applications
Image Gallery
Technical Parameters
|
Robot Platform |
|
|
Size |
≤830×600×460mm(Fully Stowed) |
|
Weight |
≤37kg (Contains two sets of batteries) |
|
Maximum Speed |
≥ 1.8m/s(5 gears, continuously variable) |
|
Over Obstacle Ability |
≥ 300mm |
|
Across Groove Width |
≥ 400mm |
|
Gradeability |
≥45° |
|
Climb Stairs |
≥45° |
|
Battery Life(Normal temperature) |
≥2h |
|
IP Grade |
IP66 |
|
Robotic Arm Grabbing Performance |
|
|
Extended State |
≥6kg |
|
Retracted State |
≥16kg |
|
Claws |
2 |
|
Movable Joints |
8 |
|
Maximum Observation Height |
≥2400mm |
|
Maximum Gripping Height |
≥1700mm(Main clawer),≥2000mm(Vice- clawer) |
|
Farthest Grabbing Distance |
≥1380mm(Main clawer),≥1650mm(Vice- clawer) |
|
Maximum opening width of gripper |
≥160mm |
|
Portable Controller |
|
|
Size |
≤360×210×70mm |
|
Weight |
≤2kg(Without backpack) |
|
Display Screen |
10.1'' LCD |
|
Video Display |
7-channel |
|
Operation Method |
Dual-mode operation of button rocker and touch screen |
|
Control Method |
Cable control≥100m(Standard cable),Wireless control≥1000m(Outdoor) |
Contact Us
Ms. Amy
Email : amy-huang@mysmech.com
Recommended Products